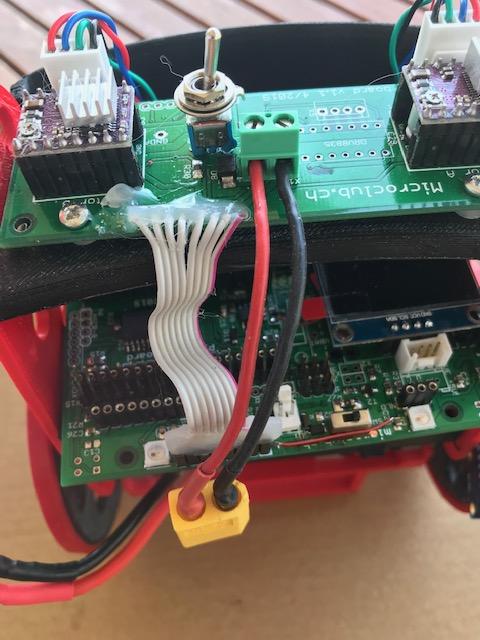
Raccord entre les 2 PCB (Driver vers Board principal). Un câble plat soudé d’un ou des 2 côtés de préférence. On y voit aussi le câble vers l’accu branché sur le bornier à vis (+ côté interrupteur). Ceci permet de brancher directement un accu avec connecteur XT60 sur notre montage (Robot Balanceur par exemple). La carte est protégée par une diode pour éviter un mauvais branchement.
.

Branchement des moteurs (2x 4 fils Noir+Vert+Bleu+Rouge)
2 Diodes LED sur ce circuit, au milieu, une diode verte indique le 12V à l’entrée de la carte. En haut de notre photo, il y a une 2ème LED Bleu ou Rouge à côté de R14 indiquant que les moteurs sont activés.
-
Ce sujet a été modifié le il y a 6 années et 7 mois par
 Rolf Ziegler.
Rolf Ziegler.
-
Ce sujet a été modifié le il y a 6 années et 7 mois par Rolf Ziegler.
-
Ce sujet a été modifié le il y a 6 années et 7 mois par Rolf Ziegler.
-
Ce sujet a été modifié le il y a 6 années et 7 mois par Rolf Ziegler.
